TeensyINS
Ever since I found out Kalman Filters, especially in the context of their use in the Apollo program, I have been wanting to implement one myself! This is a 3D MEMS INS using a Madgwick AHRS for attitude estimation and a Kalman filter for position and velocity estimation.
I initially ran into both CPU and SRAM limitations on an Arduino Uno board so I upgraded to a much more powerful Teensy 4.0. I used an GY-91 board and an Adafruit Ultimate GPS Breakout v3 as my sensors. I wrote a Quaternion library in C++ using BasicLinearAlgebra matrices in order to convert the body accelerations in Roll-Pitch-Yaw into North-East-Down and compensate for gravity. Kalman predictions are generated at 200Hz – deemed adequate as that is the filtering rate on Invensense’s Digital Motion Processor – with Barometric and GPS updates at 1Hz. With further optimization I believe the prediction rate could easily be increased to 1kHz or more.
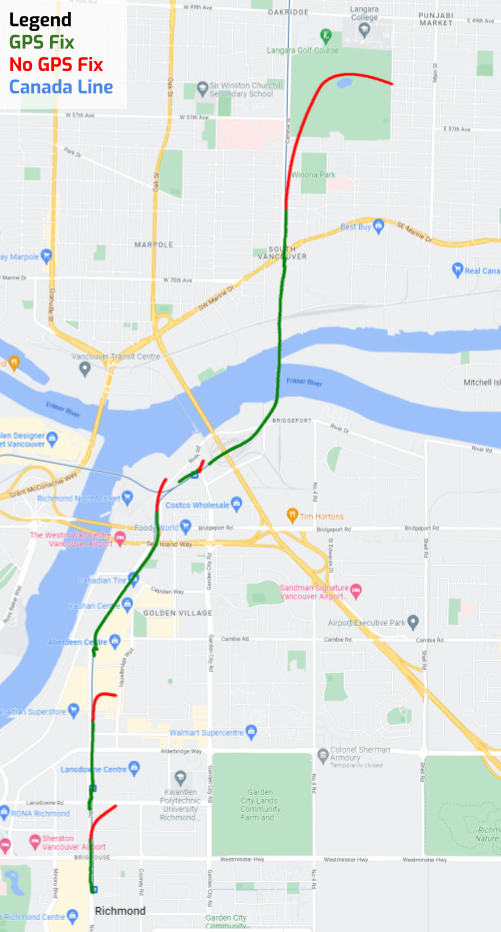
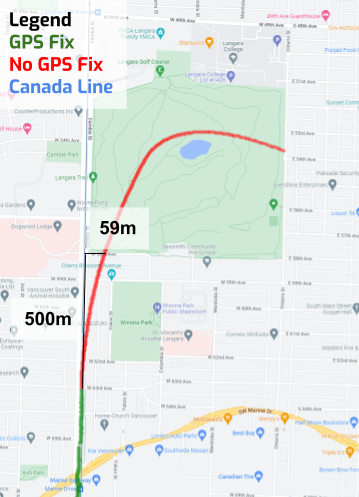
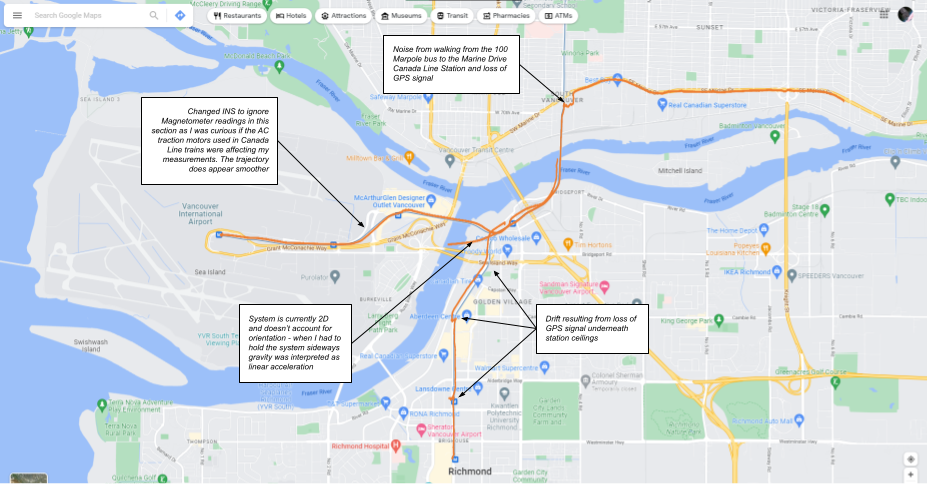
The No GPS Fix performance reflects the limitations of my components, test set-up, and calibration. First, my MEMS INS performed roughly 10x worse than the equipment used by Goodall et al.for example, but also were purchased for one-tenth of the price. However, it compared favourably to the performance observed by Noureldin et al. While both of these experiments were likely fully strapped down, I had to hold the INS in my lap on the Canada Line during tests, which increased the noise in my tests. Finally, uncalibrated gyro drift had a large impact on my telemetry as you can see from the data at bottom-right when the Canada Line goes underground. I had hoped that the magnetometer would be able to compensate, but with the train being underground and powered by large AC traction motors, magnetic distortion is to be expected.
I owe an enormous debt of thanks to Mr. Dan Simon, author of Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches, which was an invaluable resource for this project.